正文内容 评论(0)
另类DIY:卖萌的小骷髅

7、安装下颚的伺服电机

电机通过两个螺栓固定到头骨上。电机上连接着原先用来控制航模副翼的摇臂(我用来控制眼睛的电机也一样)。简单的用铁丝弯成个拉钩。在确定下颚允许运动的范围(嘴的开合位置)之后,用两滴强力胶将旋转轴固定到下颚上,然后将电机和旋转轴之间用做好的金属拉钩连上就行了。
8、安装眼球的伺服电机

为了控制眼球的转动,用一个塑料条连接到眼球背后插入的短螺杆,使两个眼球能够同时朝一个方向运动。塑料条像图中一样用粗铁丝连接到伺服电机的摇臂上。

检查机械部分的运作正常之后,量出伺服电机的允许运动范围,之后在软件算法里控制。
伺服电机工作的样子:
9、电机的控制
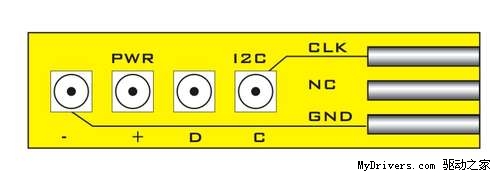
为了控制头骨的运动,我用双节棍手柄配合一个作为“大脑”的Arduino板进行操纵。
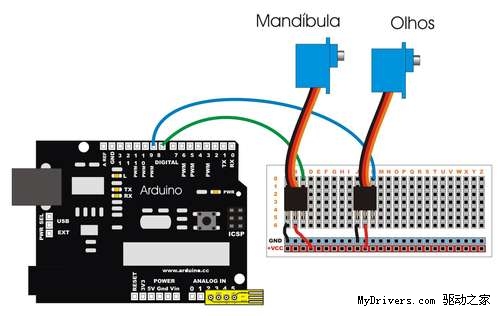
将手柄连接到Arduino电路板上时我用了个专用插座。
连接是非常简单的,电机通过万能电路板连接到引脚8和引脚9,电机的电源来自Arduino电路板,而电路板的供电来自USB线或者电池(没有通过USB线连上电脑时候)。

我把软件中的参数针对头骨中眼球和下颚的运动范围做了调整。
(文/果壳网)
本文收录在
#快讯
- 热门文章
- 换一波

- 好物推荐
- 换一波
- 关注我们
-

微博:快科技官方
快科技官方微博 -

今日头条:快科技
带来硬件软件、手机数码最快资讯! -

抖音:kkjcn
科技快讯、手机开箱、产品体验、应用推荐...